For HDJ
向量和矩阵基础
1×n 行向量,m×1 列向量
实数:有理数和无理数的统称。实矩阵:矩阵 A 中每一个元素都是实数。
复数:拥有实部和虚部 a+bi。复矩阵:矩阵 A 中每一个元素都是复数。
向量的运算
向量之间的基本代数运算有两种:加法和数乘,统称为向量的线性运算。L2-[23-24]
矩阵的运算
矩阵的加法
两个相同 m×n 的矩阵相同位置上的元素相加,C=(cij)m×n=(aij+bij)m×n。L2-[25]
矩阵加法满足,交换律、结合律。L2-[26]
零矩阵 O
元素全为零的矩阵,Om×n。
矩阵相乘
A=(aij)m×r,B=(bij)r×n,C=AB。L2-[28]
矩阵相乘满足,结合律、左分配律、右分配律。不满足交换律。L2-[27]
单位矩阵
主对角线上的元素全是 1, 其余元素全是 0 的 n 阶方阵。记为 I 或 In。L2-[29]
矩阵和向量相乘
Ax=b L2-[30]
矩阵和标量相乘
矩阵中的每一个元素都乘以标量值,λA=(λaij)m×n L2-[31]
矩阵分块
将大矩阵分为几个小矩阵,也满足矩阵的运算规律。L2-[34-35]
初等变换
- 一个非零的数,乘矩阵的某一行(列)
- 把矩阵的某一行(列)的 c 倍加到另一行(列)
- 交换两行(列)的位置
行变换相当于左乘初等矩阵,列变换相当于右乘初等矩阵。L2-[37]
可逆矩阵
AA−1=I,则 A 可逆。称为“可逆”、“正规”、“非奇异”的。
“奇异” = “不可逆”
如果它可逆,我们就能通过初等行变换求出它的可逆矩阵。L2-[39]
转置矩阵
行和列互换,AT=(aji)n×m
逆和转置的性质
- AA−1=A−1A=I
- (A+B)−1=A−1+B−1
- (A+B)T=AT+BT
- (AB)−1=B−1A−1
- (AB)T=BTAT
- (A−1)T=(AT)−1
利用初等行变换求解线性方程组
先画出增广矩阵,将系数矩阵化成单位阵,此时右边一列即为方程组的解。L2-[44]
利用系数矩阵的逆矩阵求解线性方程组
A−1Ax=A−1b,那么 Ix=A−1b,即 x=A−1b。L2-[45]
向量空间
又称为“线性空间”。在这个空间上,向量以及向量的运算,共同构造出的空间。(但实际上,数或矩阵的空间也叫向量空间)L3-[4]
设 V 是 n 维向量的非空集合,K 是数域。
- V 上定义了加法
- K 与集合 V 定义了数乘
- ∀a,b∈V,都有任意的 k∈K,满足 a+b,ka∈V。(加法和数乘运算封闭)
满足上面三条,称 V 为数域 K 上的 n 维向量空间或线性空间。L3-[6]
所以有例1和例2的向量空间、矩阵空间。L3-[7-8]。例3复数域的向量空间、例4一元多项式的向量空间。L3-[8-10]
向量子空间
设 X 是 K 上的 n 维线性空间,Y 是 X 的子集。如果满足:(加法和数乘运算封闭)
- 若 x,y∈Y, 则 x+y∈Y
- 若 a∈K,x∈Y,则 ax∈Y
则称 Y 是 X 的线性子空间,简称子空间。L3-[12]
非空的线性空间一定会有的子空间:自身和 0
零子空间
只含零向量的子集称为零子空间。L3-[12]
平凡子空间
零子空间、线性空间本身统称为平凡子空间,其他子空间称为非平凡子空间。L3-[12]
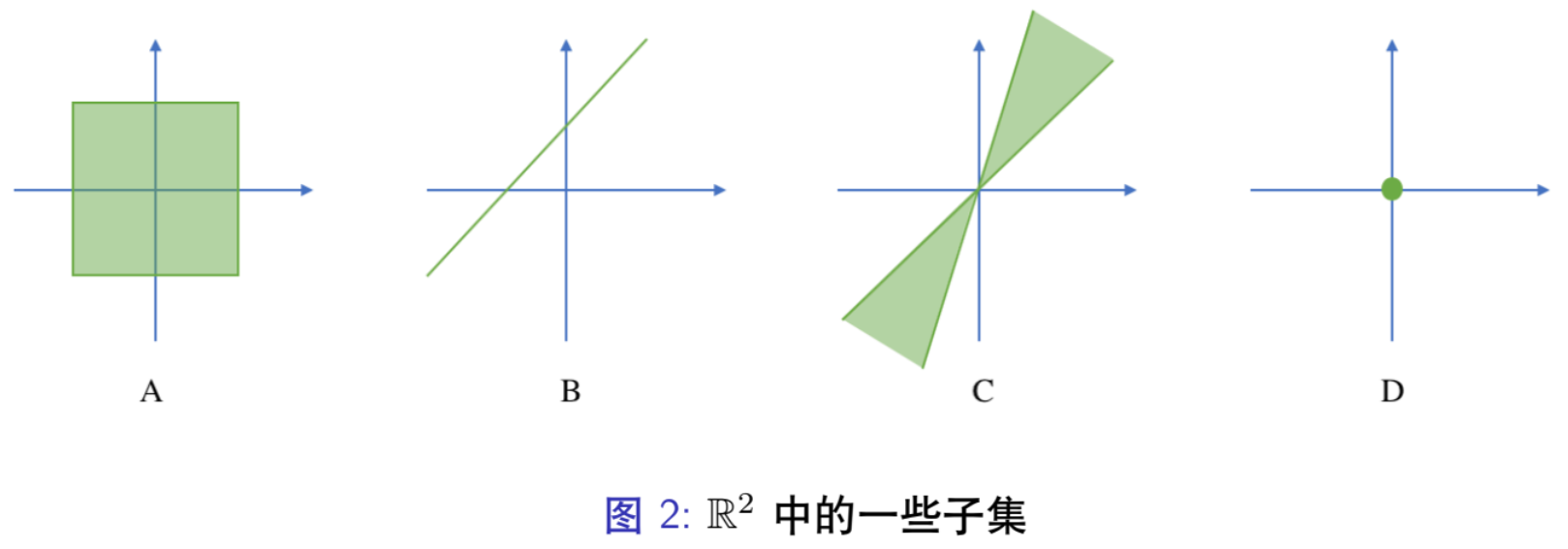
二维实数子空间 R2
R2 空间指二维空间。下图中,只有 D 是 R2 的子空间。L3-[13]
子空间的证明
知乎:如何证明一个向量空间是另一个向量空间的子空间?
- 子集
- 加法零元
- 加法运算封闭
- 数乘运算封闭
线性方程组 Ax=b 的解空间
L3-[14]
子空间的交、和、直和
前提:Y1 和 Y2 均为 X 的子空间。L3-[15-16]
若用 Y1∩Y2 表示集合的交集,则 Y1∩Y2 也是 X 的子空间。称为“交”
若用 Y1+Y2 表示 y1+y2(y1∈Y1,y2∈Y2) 组成的集合,则 Y1+Y2 也是 X 的子空间。称为“和”。
若 Y 每个向量 x 可唯一表示成 x=y1+y2(y1∈Y1,y2∈Y2)。则称 Y 为 Y1 与 Y2 的“直和”。记为 Y=Y1+Y2 或 Y=Y1⊕Y2
定理3和定理4,为直和的充要条件。L3-[16]
线性无关性
线性组合、组合系数、线性表出
- 设向量 a1, a2, ..., as 是数域上 K 上的 n 维向量组。
- 设一组数 k1, k2, ..., ks 在数域上 K。
那么表达式 k1a1+k2a2+...+ksas 称为向量组 a1, a2, ..., as 的一个线性组合。k1, k2, ..., ks 称为组合系数。
若向量 b 是向量组 a1, a2, ..., as 一个线性组合,即 b=k1a1+k2a2+...+ksas,则称 b 可以由向量组 a1, a2, ..., as 线性表出。L3-[19-20]
线性相关、线性无关
可以看 PPT 的 23 页 L3-[23]。
解方程 k1a1+k2a2=0,当且仅当 k1=k2=0 时成立。L3-[32]
极大线性无关组
向量组的一部分组称为一个极大线性无关组, 如果这个部分组本身线性无关,但从原向量组的其余向量中任取一个添加进去后,所得的部分组都线性相关。L3-[21-23]
等价向量组
如果向量组 a1, a2, ..., as 每一个向量都可以用 b1, b2, ..., bt 线性表出,则称 向量组 a1, a2, ..., as 可以用 b1, b2, ..., bt 线性表出。
如果两个向量组可以线性表出,则称它们等价。L3-[25]
生成集
设 a1, a2, ..., ar 是 V 的一组向量,这组向量所有可能的线性组合所成的集合是 V 的一个子空间。该子空间称为由 a1, a2, ..., ar 张成的子空间,记作 L(a1, a2, ..., ar) 或 span(a1, a2, ..., ar)。那么 {a1,a2,...,ar} 就叫做 V 的一个生成集。L3-[27]
两个向量组张成相同子空间的充要条件是:两个向量组等价。
维数、基
如果向量空间 V 中由 n 个线性无关的向量 a1, a2, ..., an,且 V 中任一向量都可以用它们线性表出,则称 V 为 K 上的 n 维线性空间。
那么,n 称为 V 的维数。记作 dim(V)=n。而 a1, a2, ..., an 就是 V 的一组基。
一些关于基、最小生成集、极大线性无关组的等价命题L3-[30]:令 V 是一向量空间,B⊆V,B=∅,下面命题等价:
- B 是 V 的一个基
- B 是最小生成集
- B 是 V 中的极大线性无关组
- V 中的每一个向量能被 B 线性表出
标准基
如果一组基中的每一个向量长度均为 1,我们称其为标准基。L3-[31]
确定向量组是否是一组基
求解极大线性无关组,有多少个线性无关的向量就是几维向量空间。L3-[32-33]
子空间的扩张
L3-[34]
假设有 n 维空间 X,它有一个 m 维子空间 Y=L(a1,a2,...,am),这个向量组可以扩张为 a1,a2,...,am,am+1,...,an,使得 X=L(a1,a2,...,am,am+1,...,an)
L(a1,a2,...,am)⊕L(am+1,...,an)=L(a1,a2,...,am,am+1,...,an) 那么就有一些和、直和维数公式。
- dim(Y1+Y2)=dimY1+dimY2−dim(Y1∩Y2)
- dim(Y1⊕Y2)=dimY1+Y2
有限维线性空间
如果向量空间 V 中任一向量都能被 n 个线性无关的向量线性表出时,V 称为有限维线性空间。否则称为无限维线性空间。L3-[35]
一个向量被一组基“线性表出”的系数。
在 n 维向量空间 V 中,n 个线性无关的向量 ϵ1,ϵ2,...,ϵn 称为 V 的一组基。设 a 是 V 中的任一向量,那么肯定 ϵ1,ϵ2,...,ϵn,a 线性相关。因此 a 可以被基 ϵ1,ϵ2,...,ϵn 线性表出:
a=a1ϵ1+a2ϵ2+...+anϵn 这系数就成为 a 在基 ϵ1,ϵ2,...,ϵn 下的坐标,记为 (a1,a2,...,an)。L3-[36]
例15:有关泰勒展开的例子 L3-[37],例16:换基之后的坐标 L3-[39]
极大线性无关组中所含向量的个数称为这个这个向量组的秩,记作 rank{a1,a2,...,ar}
dimL(a1,a2,...,ar)=rank{a1,a2,...,ar} 维数和秩相等。
矩阵的秩有行向量的行秩,和列向量的列秩,它们都相等,都称为矩阵的秩,记作 rank(A)。
可以看例17。L3-[43]
仿射子空间
令 V 是一线性空间,x0∈V,且 U⊆V 是一线性子空间,则子集 L=x0+U:={x0+u∣u∈U}⊆U 是一仿射子空间。
我们定义线性子空间的维数是仿射子空间的维数。
若 U 有一基底 a1,a2,...,am,则 L 中的每一个元素 x 均可写成 x0+k1a1+k2a2+...+kmam。L3-[48]
超平面
R3 的 n−1 维仿射子空间称为超平面。例如三维空间中一个平面就是它的超平面,四维空间中,一个超平面是三维空间。L3-[49]
Ax=b,b=0 的解空间是一个仿射空间
L3-[50]
线性映射
集合的映射
L4-[5]
设 V,W 是两个非空集合,如果存在一个映射 f,使得对 V 中每个元素 v,在 W 中有唯一确定的元素 w 与之对应,则称 f 为从 V 到 W 的映射,记作:
f:V→W - w 称为元素 v 在映射 f 下的像,并记作 f(v),即 w=f(v)。
- v 称为元素 w 在映射 f 下的原像。
- 集合 V 称为映射 f 的定义域,记作 Df。即 Df=v。
- V 中所有元素的像所组成的集合称为映射 f 的值域,记作 Rf 或 f(V)。即 Rf=f(V)={f(v)∣v∈V}。
单射、满射、双射
L4-[6]
设 V,W 是任意两个集合,φ:V→W 是一个映射,如果
- ∀x,y∈V,若 φ(x)=φ(y),一定是 x=y,则称 φ 为单射。
- φ(V)=W,则称 φ 为满射。
- 如果既是单射又是满射,则称 φ 为双射。
线性映射
L4-[7]
设 V,W 是数域 K 上的两个有限维的向量空间,φ 是 V 到 W 的一个映射。
如果对任何向量 x,y∈V 及任意的 α,β∈K 都满足下式,则称 φ 是 V 到 W 的一个线性映射。
φ(αx+βy)=αφ(x)+βφ(y) 一个满足线性映射的例子:L4-[10]
一个不满足线性映射的例子:L4-[9]。
恒等映射
L4-[8]
若映射 σ:V→V,σ(x)=x,那么它就是一个恒等映射。
- σ(αx+βy)=αx+βy=ασ(x)+βσ(y)。
- 恒等映射也是线性映射。
向量空间之间的特殊映射
L4-[11]
设 V,W 是数域 K 上的两个有限维的向量空间:
- φ:V→W 是线性映射,则 V,W 同态。φ 称为同态映射。
- φ:V→W 是线性映射且是双射,则 则 V,W 同构。φ 称为同构映射。
- φ:V→V 是线性映射,则 V 自同态。φ 称为自同态映射。
- φ:V→V 是线性映射且是双射,则 V 自同构。φ 称为自同构映射。
若 V,W 同构,当且仅当 dim(X1)=dim(X2) L4-[13]
逆映射
如果 φ:V→W 是一个双射,则可以定义它的逆映射,记作 φ−1:W→V。 L4-[14]
向量空间映射的运算
考虑向量空间 V,W,X,则有:L4-[15]
- 对于线性映射 φ:V→W 和 ϕ:W→X,则 ϕ(φ) 也是一个线性映射。
- 如果 φ:V→W 是同构映射,则 φ−1:W→V 也是一个同构映射。
- 如果 φ:V→W 和 ϕ:V→W 是线性映射,且 λ∈R,则 φ+ϕ 和 λφ 也是线性映射。
线性映射的矩阵表示
考虑一个 n 维向量空间 V 的基底 {b1,...,bn},并为基向量规定一个顺序。如果基底有序,则称其为有序基。L4-[19]
使用不同的基表示同一坐标
例子:L4-[21]
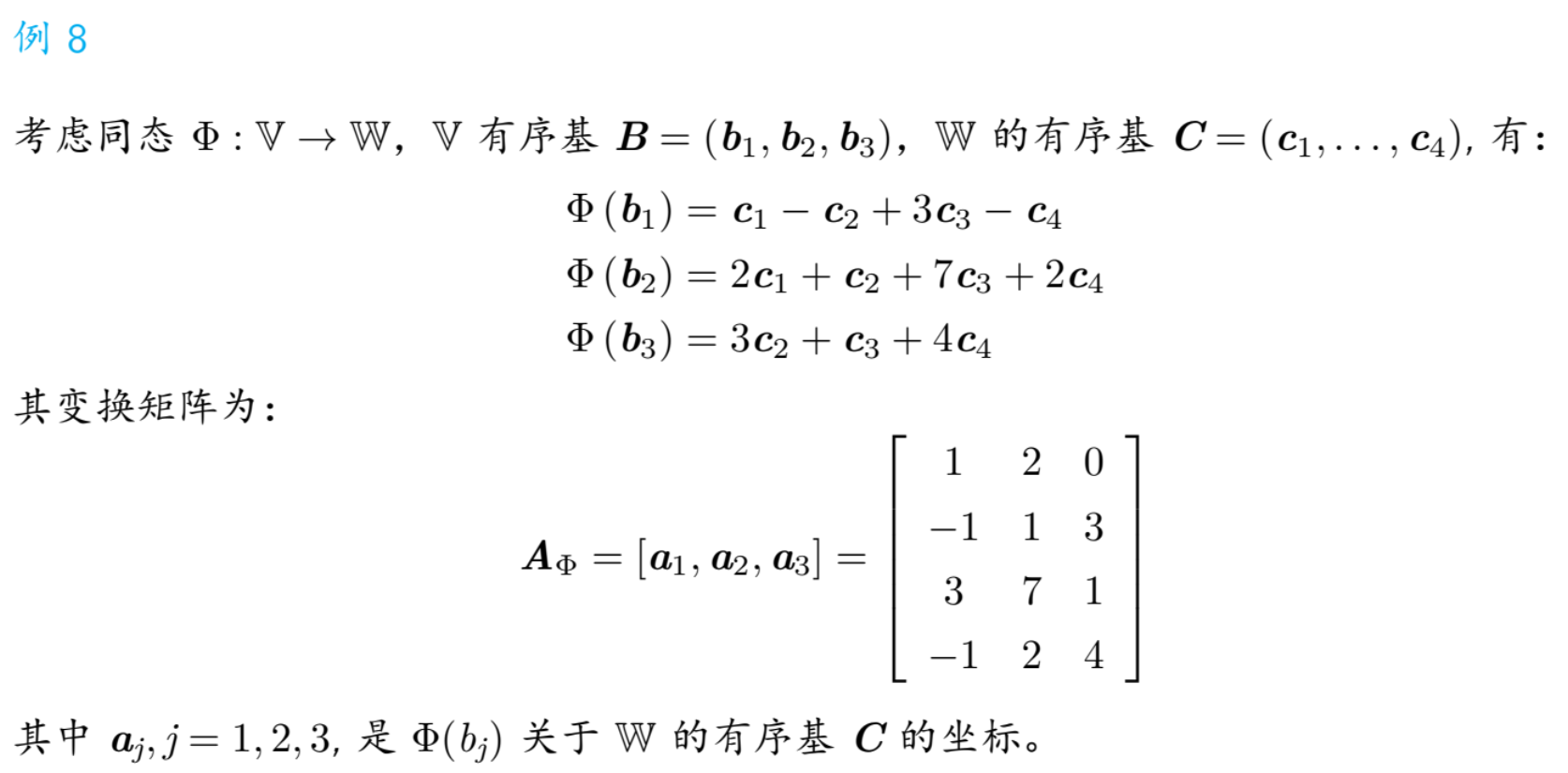
变换矩阵
例子:L4-[24]
基变换
反正目前我看不懂:L4-[25-28]
矩阵等价
如果对于两个矩阵 A,B∈Rm×n,存在可逆矩阵 S∈Rn×n,T∈Rm×m 使得 A=T−1BS 成立,则称 A,B 等价。
矩阵相似
如果对于两个矩阵 A,B∈Rn×n,存在可逆矩阵 S∈Rn×n 使得 A=S−1BS 成立,则称 A,B 相似。
所以两个相似的矩阵必定等价,反之则不然。L4-[29]
复合线性映射的变换矩阵
反正目前我看不懂:L4-[32-34]
核与像
反正目前我看不懂:L4-[34-36]
列空间
反正目前我看不懂:L4-[37-39]
线性变换
反正目前我看不懂:L4-[41-47]
可以看看总结这段:y=Ax,A 是线性变换的基矩阵,y 是变换后的坐标。L4-[46]
相似变换
线性映射 TQ(A)=Q−1AQ,其中 Q 是可逆矩阵,称其为矩阵的相似变换。L4-[41]
仿射映射
反正目前我看不懂:L4-[49-50]
行列式
L5-[5-9]
- n 阶行列式实际上对应 n 维空间中图形的有向体积。
- 交换矩阵相邻两行(列)、交换矩阵两行(列)都改变行列式的符号。L5-[13]
- 如果将行列式的某一行(列)k 倍加到另一行(列),则行列式的值不变。
代数余子式
(−1)i+j。 L5-[10-11]
克莱姆法则
L5-[12]
行列式的性质
L5-[17]
设 A,B∈Rn×n
- det(A)=det(AT)
- det(aA)=andet(A)
- det(AB)=det(BA)=det(A)det(B)
- A 是可逆矩阵当且仅当 det(A)=0
- 若 A 是可逆矩阵,则 det(A−1)=det(A)1
伴随矩阵
L5-[18]
A∗ 的第 i 行第 j 列元素是矩阵的第 j 行第 i 列元素的的代数余子式。(呃)
- AA∗=A∗A=∣A∣I
- 如果 A 可逆,则 A∗=∣A∣A−1,A−1=∣A∣1A∗
L5-[21]
方阵对角元素的和为迹,记作 Tr(A)=∑i=0naii
- Tr(A+B)=Tr(A)+Tr(B)
- Tr(αA)=αTr(A),α∈R
- Tr(In)=n
- Tr(AB)=Tr(BA)
- 循环置换不变性:Tr(ABC)=Tr(CAB)=Tr(BCA)
- 相似矩阵迹相等:Tr(Q−1AQ)=Tr(QQ−1A)=Tr(A)(换顺序了)
二次型
L5-[24]
标准型
L5-[30]
https://blog.csdn.net/ccnt_2012/article/details/84784311
可用初等行变换将二次型化为标准型。
合同矩阵
CTAC=B,A 合同于 B。L5-[26]
特征值和特征向量
L5-[38]
特征子空间、矩阵的特征系、矩阵的谱、矩阵谱半径
L5-[39]
很多性质
L5-[43]
L5-[45]
- 矩阵 A 的特征值的和为矩阵 A 的迹
- 矩阵 A 的特征值的积为矩阵 A 的行列式
- 关于对角矩阵 L5-[47]
向量范数
1 范数或 l1 范数或 Manhattan 范数
L6-[10]绝对值之和
2 范数或 l2 范数或 欧几里得范数
L6-[10]平方和开方
∞ 范数或 l∞ 范数
L6-[11]绝对值,最大值
基数函数或 l0 范数
L6-[14]非负数之和。
单位范数球
L6-[17]对于 lp 范数小于等于 1 的向量集合。
重要关系
L6-[20]∣∣x∣∣∞≤∣∣x∣∣2≤∣∣x∣∣1≤n∣∣x∣∣2≤n∣∣x∣∣∞
等价范数
L6-[21]内积(点积)
L6-[23]两个向量对应元素乘积直和。
L6-[24]要满足:非负性、对称性、齐次性、线性性
定义了内聚的线性空间称为内积空间,内积是标准内积称为欧氏空间
内积不是点积的例子 L6-[25]
正定矩阵的内积表示
L6-[29]内积导出的范数
L6-[31]柯西施瓦兹不等式
<x,y>2≤∣∣x∣∣2∣∣y∣∣2
欧式距离
L6-[35]L6-[36]度量空间、距离空间
L6-[37]L6-[40]正交、标准正交
L6-[41]相似性度量
闵可夫斯基距离
L6-[47]曼哈顿距离
L6-[49]欧氏距离
L6-[48]切比雪夫距离
L6-[51]余弦相似度
L6-[55]汉明距离
L6-[58]矩阵内积与范数
矩阵向量化
L6-[60]矩阵内积
L6-[61]广义矩阵范数
L6-[62]l1 矩阵范数
L6-[63]l2 矩阵范数
L6-[65]l∞ 矩阵范数、Frobenius 范数
L6-[64]相容性条件
L6-[67]算子范数
由向量范数诱导出的算子范数(矩阵范数和向量范数相容导出)
L6-[70]1、2、无穷的的矩阵范数
L6-[72]谱范数只需要计算 ATA 的最大特征值
2 范数、谱范数的性质
L6-[80]四个基本子空间
L7-[5],本章约定
L7-[6]。
获得四个基本子空间的定理1:L7-[9]
列空间
L7-[7]行空间
L7-[7]零空间
L7-[8]左零空间
L7-[8]四个基本子空间的基
我们接下来的目标是: 求四个基本子空间的基和维数。
L7-[13]定理:L7-[13]、L7-[16],证明:L7-[14]
四个子空间的正交关系
L7-[18]无交连
L7-[20]正交(垂直)
L7-[20]正交的两个子空间必定是无交连的。
无交连的子空间不一定是正交的。
向量正交分解
L7-[23]线性代数基本定理
L7-[26]正交投影
L7-[30]正交投影
投影到一维子空间的计算
L7-[36]投影到 n 维子空间的计算
L7-[42]- 解 λ 方程,BTBλ=BTx
- 算投影点:Bλ
- 算投影矩阵:B(BTB)−1BT
仿射空间的正交投影
L7-[46]标准正交基
L7-[49]Gram-Schmidt 正交化
公式:L7-[53]
例题:L7-[54] (系数可以不管)
特殊矩阵
L9-[4]对称矩阵
L9-[5]AT=A
(半)正定矩阵
L9-[5]对角矩阵
L9-[6]A=diag(a)=diag(a1,a2,...,an)
对角矩阵的幂、逆矩阵:L9-[7]
三角矩阵
L9-[8]三角矩阵性质:L9-[9]
正交矩阵
L9-[10]正交矩阵的逆,求转置矩阵就行
正交矩阵和范数有关的性质:L9-[11]
Dyads(并向量、单纯矩阵、秩 1 矩阵)
L9-[12]分块矩阵
L9-[15]分块三角矩阵
L9-[17]分块三角矩阵的逆:L9-[18]
矩阵求逆引理、Woodbury 公式
分块三角矩阵的逆:L9-[20]
秩1扰动(Sherman-Morrison 公式)
L9-[21]拉普拉斯矩阵
L9-[39]正规化的拉普拉斯矩阵
L9-[40]拉普拉斯矩阵的性质
L9-[47]低秩矩阵
L9-[57]矩阵分解 ⭐
分解的目标矩阵、方阵、对称矩阵、正半定矩阵、稀疏矩阵和低秩矩阵
LU 分解
L10-[5]A=LU,L 为 单位下三角,U 为上三角
LU 分解例子:L10-[10]
所见即所得的 LU 分解例子:L10-[17]
选主元的 LU 分解
LU 分解例子:L10-[23]
QR 分解
基于 Gram-Schmidt 正交化的 QR 分解(感觉会这个差不多了)
看不懂的形式化说明:L11-[5]
例题:L11-[10]
基于 Householder 正交化的 QR 分解
看不懂的形式化说明:L11-[15]
例题:L11-[23]
基于 Givens 变换的 QR 分解
看不懂的形式化说明:L11-[35]
例题:L11-[39]
对称矩阵的谱分解
对称矩阵的谱分解(特征分解):可以把任意对称矩阵分解成三个矩阵的积,包括一个正交矩阵和一个实的对角矩阵。
例题:L12-[14]
正半定矩阵与 Cholesky 分解
正 (半) 定矩阵的 Cholesky 分解:可以把任意对称正定 (半) 矩阵分解成一个具有正的对角元的下三角矩阵和其转置的乘积。
看不懂的形式化说明:L12-[32]
例题:L12-[36](通过特征值判断是否,对称矩阵是否是,正 (半) 定矩阵,只有是了才能分解)
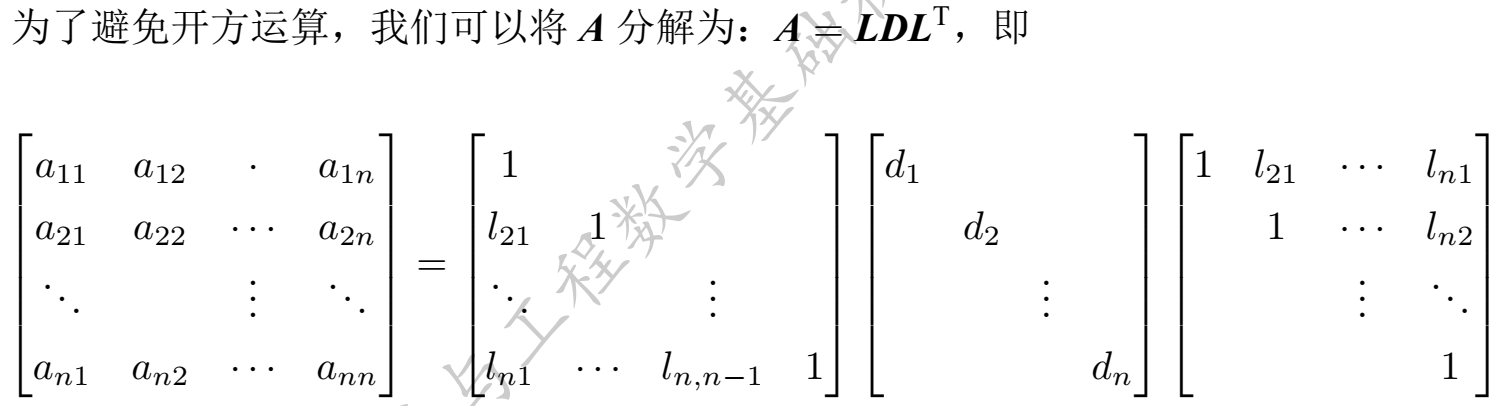
不带平方根的 cholesky 分解:
奇异值分解(SVD)
看不懂的形式化说明:L13-[8]
计算说明:L13-[24]
例题:L13-[27]
解线性方程组
基于矩阵分解的求法
L14-[25]注意前代法和回代法。L14-[30]
例如 LU 分解,即 LUx=b,那么先求 Ly=b,再求 Ux=b
最小二乘问题
问题定义:L15-[8]
正规化方法(Cholesky 分解法)求解最小二乘问题 L15-[22]
QR 分解法求 L15-[25]
奇异值分解法求 L15-[29]
特征值问题
圆盘定理
L16-[7]例题:L16-[9]
估计谱半径的范围 L16-[12]
L16-[14]反幂法
L16-[26]向量与矩阵微分
实值函数
L17-[7]矩阵值函数
L17-[20]